ドローンを制作しました。以下、目指したスペックと使用パーツ、費用、制作にあたり難航したところを記します。
目指した機能と性能
今回の制作にあたり、実現したかった機能は大きく1つのみ。ドローンとして飛行することはもちろんなのですが、映像を撮影できるという機能を実現することです。
加えて、機能以外ではバッテリー込みの重量が100gよりも軽くなるというスペックを目指しました。また、4K60pで撮影できることも実現したい性能でした。
パーツリストと費用
目指すべき機能と性能を決めた後は、必要なパーツをいろいろと調べ始めました。
これがだいたい3月くらいだったかな….。
パーツについていろいろと調べるなかで、100gよりも軽量なドローンを実現するにあたり、4K60pでの撮影は難しそうな現実に直面し、ひとまず4K60pの性能実現は諦めたりもしました….。
購入した機体パーツと、その他の機材についてもここに記しておきます。
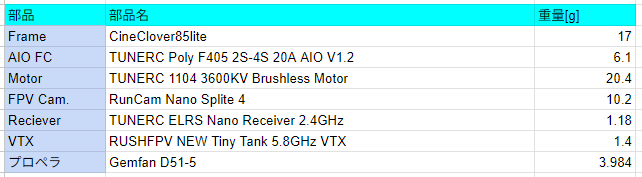
機体パーツ
機体パーツについてはメーカーや販売店の在庫をチェックしつつ購入したので、3月から5月の2カ月にかけてのんびりと購入を行いました。
※重量はメーカーサイトから引用した数値もしくは私が実測した値を掲載しています。
VTXについては無線局の増設申請が必要ですので、機体を組み上げて電源を入れる前に、申請及び審査完了のお知らせを受け取る必要があります。申請については以前に
「2025.04.リニューアル後の総務省電波利用申請をやりました」というブログで記しております。審査完了については「2025.05.総務省電波利用申請の審査完了!」で記しております。
パーツの購入順に、どのように考えて買っていったかを書いておきます。
上の表の順番とは違うので、あしからず。
Frame
フレームは撮影時の安定性と軽さ、あとはかっこよさとプロペラガードを有することを条件に探しました。FPV撮影まで行うことを見越すと、CineWhoopTokyoさんのCineClover85liteが定番で良さそうだったので、購入。
VTX
とにかく軽いものを選定。ついでに、RUSHFPVのTinyTankは変換基板もついているので、サイズの大きなドローンを制作した場合にも流用できそうなのも決め手です。国内の販売代理店を経由して、系統図つきのものを購入しました。
AIO FC
FCはAIOタイプのものを探しました。AIOといっても、受信機やVTXまでは搭載されていないものも許容していろいろと調べました。今回制作するドローンは重量100g未満でありつつ空撮機としての運用も可能なものを目指しているので、トルク大きめなモーターを乗せることも考慮して定格電流が大き目なものを選びました。TUNERCさんのFCはネットでも評判が良さそうでしたし。
Receiver
ELRSが使用でき、軽量であれば他はこだわりは無かったので、ちょうど新製品が出ていたTUNERCさんの受信機を購入しました。
FPV Cam.
カメラだけでなく、記録媒体に映像を保存できるドローンにしたかたったので、カメラおよび記録機能があるRunCam Nano Splite 4を選びました。
Motor
モーターはどの程度の回転数のものにするか、だいぶ悩みました。同サイズのフレームで空撮機を制作している人の制作記などをネットでいろいろと読みましたが、100g未満のドローンで使用されているモーターは4000KV~8000KVくらいの回転数のものが多そうな印象です。
回転数が低いほどトルクは大きくなるので、4000KVくらいのものを買おうかなと思っていたところ、ちょうどTUNERCのサイトで3600KVのものを売っていたので購入。85mmサイズのドローンに搭載するものとしては、だいぶ回転数低めな印象。
プロペラ
プロペラガードに干渉しないようなサイズのもの、羽の枚数は4枚以上で探しました。トルク大きめのモーターのため、羽の枚数が多くても許容できそうなことと、羽の枚数が多い方が細かにドローンを動かせると考えたためです。今回はGemfanの五枚羽のものを購入。
その他の機材
機体パーツの他に、バッテリー、バランスチャージャー、PD対応のACアダプタ、USB Type-cとXT60端子のケーブル、XT60とXT30の変換ケーブル、スモークストッパー、インシュロック、熱収縮チューブ、シリコンワイヤ、はんだ小手、フラックス、はんだ吸い取り線、プラねじ、などなどいろいろと購入しました。本当は勉強のためにオシロスコープも欲しかったけど、諦め。
あとは、以前から所有していた精密カッター、マスキングテープ、カプトンテープ、ニッパー、ピンセット、はんだ作業台も活用しました。
制作期間
このブログを執筆している時点でbetaflightのチューニングについてまだまだ勉強中なので、ソフトウェア面まで含めると制作に終わりはないのかもしれないと思ったりしていますが、機体の組み立て自体はおおむね5日間で済ませることができました。
1日目
初日の一番最初はフレームを組み立てました。完成したフレームを見るとやる気が沸き上がります。フレーム組み立てを終えた後は各パーツを取り出してフレームを見つつ配置や足りない部品の把握を行いました。あとは、購入したパーツの説明書集めと読み解き。なんとなく、フレーム上にどのように配線するかイメージしておきます。
2日目
説明書を見た後、「だいたいFCを中心にいろいろと配線すればいいだろ」くらいの気持ちではんだを始めました。数年ぶりのはんだ作業、だいぶ下手です。
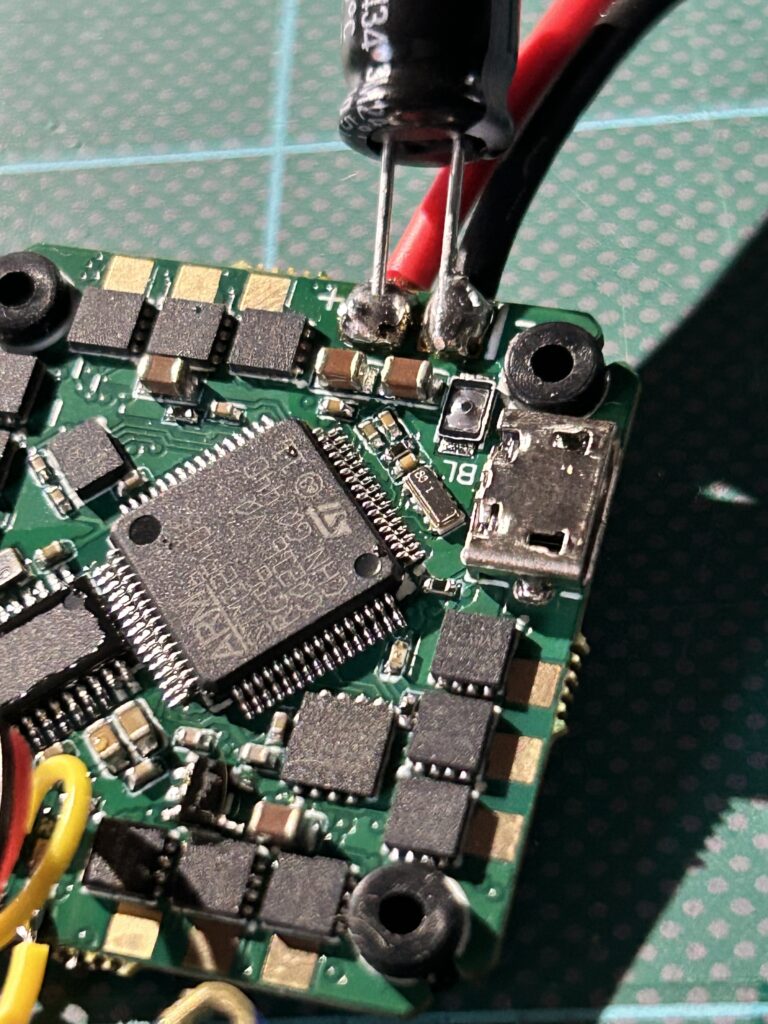
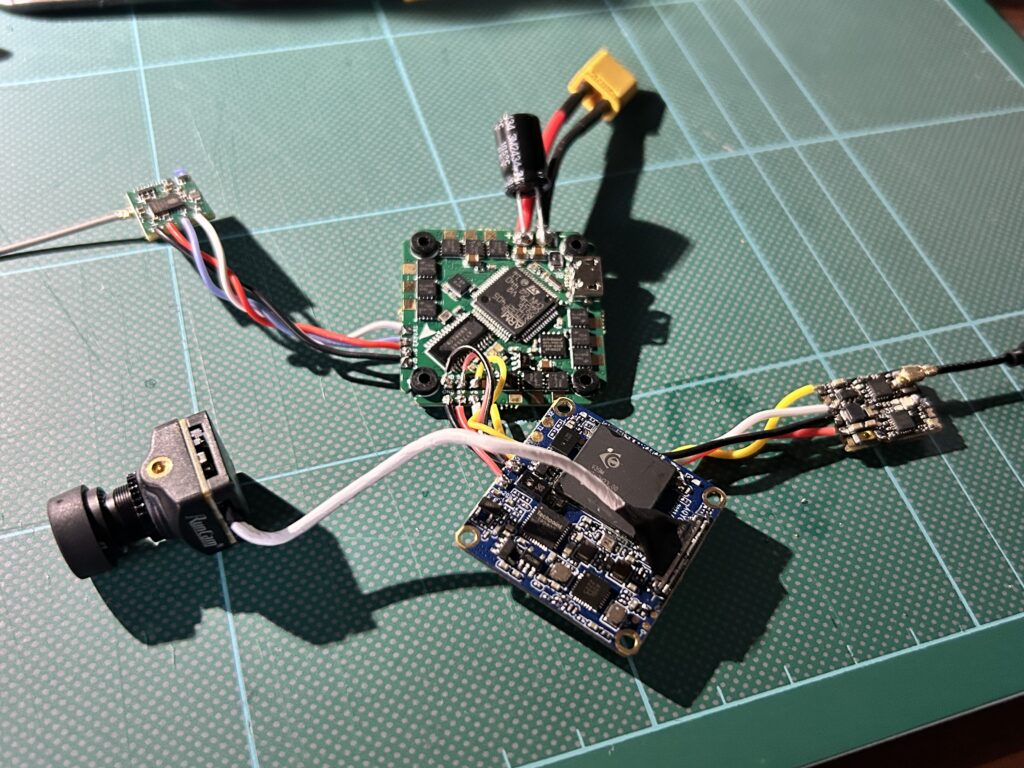
さて、ここからもう後戻りはできません。各パーツのマニュアルを確認しつつ、ひたすらに配線。とにかく、基板上の部品を焼かないように、ショートさせないように必死です。特にTUNERCのFCとRunCamのカメラの基板は壊してしまうと1万円以上の出費が見込まれます。一瞬の油断で1万、2万が飛んでいくというのはなにがなんでも避けるように集中しました。この日は配線をしただけで終了。
3日目
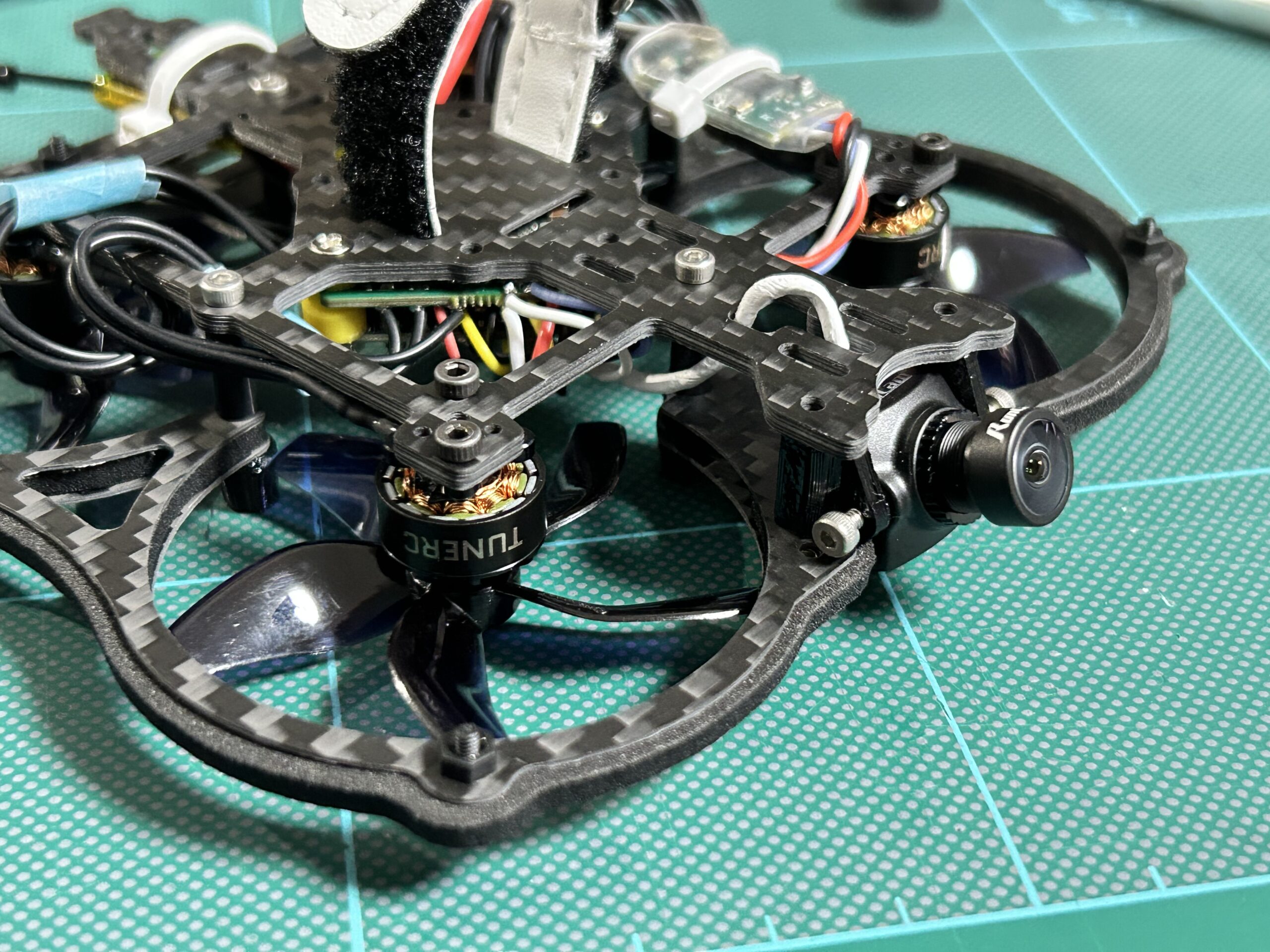
フレームに配線済みのパーツを組付けていきます。ワイヤーの長さははんだ前に調節したものでうまく収まりました。地味にヒヤヒヤしてたから、よかった…..。
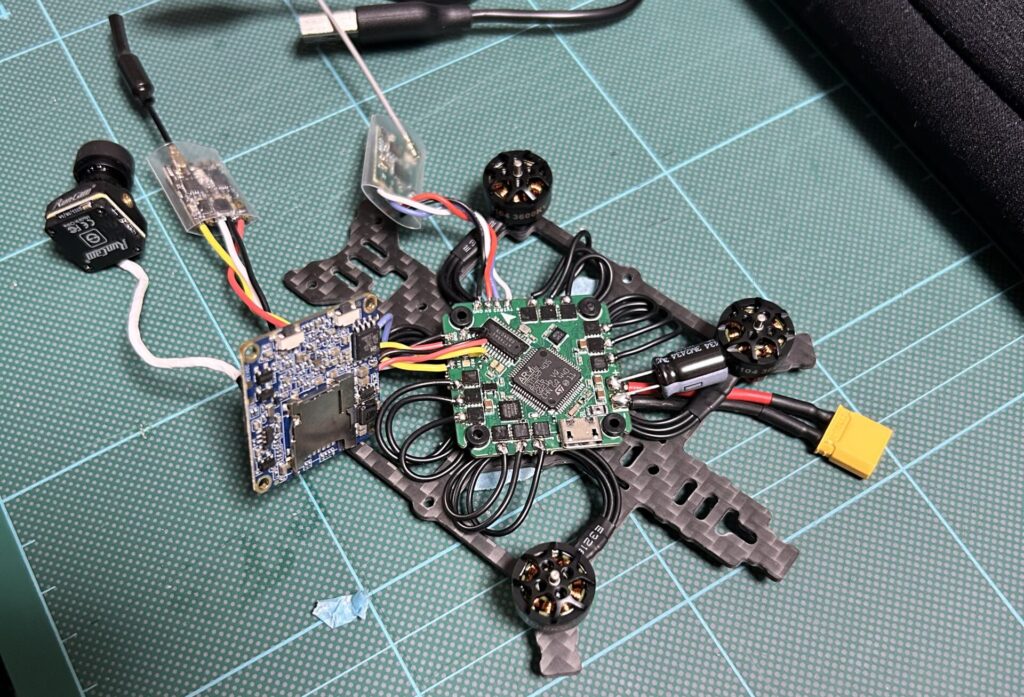
上の写真の状態で、まずFCのみをPCに接続してbetaflightでいろいろと設定できるかを確認します。ひとまずOK。ESCに通電せず、起動音が鳴らないですが、焦らずに。
次にスモークストパーを介してバッテリーと接続します。ショートは無さそう。この時点でVTXの無線局開局が済んでいないといろいろとややこしいことになるかもなので、しっかり準備をしておきましょう。
バッテリーを接続した後、ESCの起動音を聞くことができました。案外大きい….笑。ELRSのファームウェアのアップデートとプロポとのバインドを行い、betaflightで動作を確認します。一応、モーターが回るかまでは確認しました。まだプロペラ装着前です。さすがにね。
次に、VTXの設定。RUSHFPVのページからTinyTank用のVTXテーブルをダウンロードします。betaflightにてVTXテーブルを読み込み、使用するチャンネルを設定、ついでに出力も設定します。
このあたりの設定は書くと2~3行で済んでしまうのですが、実際はめっちゃいろいろと調べながらでした。ELRSのアップデートも躓きまくったし、VTXのテーブルも見つけるまでになかなかに時間がかかりました。こういう細かい情報がなかなか見つけられなかったので、だいぶ大変でした。
VTXの設定まで済ませた後、スモークストッパー無しでバッテリーを接続し、ゴーグルで映像が見られるかを確認しましたが…..映像が出ていません。VTXのステータスLEDとマニュアルをチェックすると、設定した電波が設定どおりに出ているようです。つまり、カメラ映像がVTXまで到達していないと考えられます。再度RunCamのマニュアルとFCのマニュアルをじっくり確認。配線のミスを発見したので、組みあがった機体を分解し、再度はんだ作業をしました。
もう一度機体を組み上げ、バッテリーを接続。カメラ映像が出ました!が、しかし、今度はOSDが表示されません。再度RunCamのマニュアルとFCのマニュアルを確認。しばらく熟読。おそらく配線のミスだろうと考え、再度機体を分解。はんだ作業。もう一度機体を組み上げ、OSDが表示されることを確認しました。
最初に機体を組み上げてから数度、分解・組み立てを行いました。まあまあ面倒でしたが、これをクリアすればドローンが飛ばせる!という気持ちを糧に黙々と作業をしておりました。
プロペラを抜いた機体の完成まで完了し、3日目は終了。
4日目
前日までに機体の組み上げや諸々の課題を解決し、いよいよ飛行です。まずはプロペラを装着。どのプロペラをどこにどの向きで装着するかは、慣れや事前知識が無いと混乱するかもです。私は混乱しました…..。一か所にプロペラを装着し、betaflightに接続、モーターを回転させてみて下方向に気流が発生しているかを確認し、すべてのモーターへプロペラを装着しました。
いよいよ飛行です。最初にAngleモードでの飛行を行いました。基本的に安定してホバリングできましたが、Meteor65 Proよりかは重さを感じる挙動だったかなと思います。まあ、当たり前かもですけど。窓を開けて外の風が部屋を通るようにしてみたのですが、外乱に対してはMeteor65 Proよりも安定してくれました。
調子に乗ったのでAcroモードでのFPV飛行も実施。フラフラですが、一応飛行。離着陸がへたくそすぎて、改めてじっくり練習する必要があることを痛感しました。たぶん、フレームのカーボンでできている部位はすぐ割れるのだろうという予感。
Angleモードでのホバリングと、Acroモードでの簡易的な飛行までで4日目は終了。
5日目
前日に超簡単な飛行までが行えるbetaflightの設定は済ませていましたが、5日目はPID設定やRate設定に挑戦しました。理解していないことばかりで、そもそもFPVドローンの制御は何を目標値に設定しているのかがわからず、FF制御やFB制御の概要的なものも把握していませんでした。
なので、betaflightの設定方法というよりは、FPVドローンの制御の考え方のようなところから学習をはじめました。当然、1日で終わるハズもなく、本ブログを執筆時点でもまだまだ学習を継続中です。YouTubeやネットの情報を軽く漁ってみても、betaflightの設定方法ばかりで、制御としての思想が書いてあるものがなかなか日本語でみつからないので、英語のドキュメントを読む羽目になるかもな….。と今は戦々恐々としています。
betaflightの設定についてはまた別のブログで執筆しようと思います。
実際に制作したドローンについて
4K30pでMicroSDカードに記録できるスペックは実現できましたが、4K30pの映像よりもFPVドローンならFHD60pの方が良いなあと個人的には思っているので、4K30pでは撮影しないような設定にしました。重量自体はバッテリー無で70g、バッテリーを入れるとギリギリ100gに到達しないように完成できたので、とても嬉しいです。ただ、容量の大きいバッテリーを使うと100g以上の重量になるので、長時間飛行させる可能性まで考えると、実は機体登録をしておいた方がいいのかもしれないと思ったりしています。
何回か室内で飛行させていますが、空撮機として運用するならPID設定をもっと追い込むことと、私の練習が必要な印象です。急峻なスティック操作や外乱からの影響をかなり受けている気がするので、FF制御の割合を小さくしたり、P値を小さくするかI値を大きくするかなど、いろいろと考えなければというのが現状です。
自分がやりたいFPVドローン撮影や、映像が手に入るのはまだ時間がかかりそうかな….。
コメント